%20--%3e%3csvg%20version='1.1'%20id='图层_1'%20xmlns='http://www.w3.org/2000/svg'%20xmlns:xlink='http://www.w3.org/1999/xlink'%20x='0px'%20y='0px'%20viewBox='0%200%20289.2%2071.5'%20style='enable-background:new%200%200%20289.2%2071.5;'%20xml:space='preserve'%3e%3cstyle%20type='text/css'%3e%20.st0{fill-rule:evenodd;clip-rule:evenodd;fill:%23B81C22;}%20.st1{fill:%23B81C22;}%20%3c/style%3e%3cg%3e%3cpath%20class='st0'%20d='M286.5,2.7c-0.2-0.5-0.7-1-1.6-1c-4.1,0-9.1,0-9.1,0c-2.9,0-6.1,3.1-6.1,3.1c0,0-13,14.6-21.8,23.4l-1,1%20l2.3-18.7c0.3-2.2-0.4-4.5-1.9-6.1c-1.5-1.7-3.6-2.7-5.9-2.7h-2.8c-1,0-1.8,0.7-1.9,1.7l-8.3,65.1c-0.1,0.5,0.1,1.1,0.5,1.5%20c0.4,0.4,0.9,0.7,1.4,0.7h3c4.8,0,8.8-3.5,9.4-8.3l1.8-14.2l6.6-6.6l0.3,0.5c3.5,5.3,16.2,24.4,16.9,25.6c0.4,0.4,1.9,3.1,6.2,3.1%20l8.6-0.1c0.8,0,1.4-0.4,1.7-1.1c0.3-0.7,0.3-1.4-0.1-2.1l-22.1-32.5c-1.2-1.7-1-4,0.5-5.5l23.1-24.8C286.7,3.9,286.7,3.2,286.5,2.7%20'/%3e%3cpath%20class='st0'%20d='M174.4,14.3C174.4,14.3,174.4,14.2,174.4,14.3L176,4c0.1-0.7-0.1-1.3-0.5-1.8c-0.4-0.5-1.1-0.8-1.8-0.8h-50.4%20c-1.5,0-3,1.2-3.2,2.7l-1.3,10.2h21.1l-7.1,56.2l13.1,0c0.1,0,0.1-0.1,0.1-0.1l7.4-56.2H174.4z'/%3e%3cpath%20class='st0'%20d='M13,1.4h-2.6c-0.9,0-1.8,0.8-1.9,1.7L0.8,64.4c-0.2,1.6,0.2,3,1.2,4.1c1,1.1,2.5,1.8,4.1,1.8h39.7%20c1.3,0,2.4-1,2.6-2.3c0.4-3-0.4-5.8-2.3-7.9c-1.9-2.1-4.6-3.3-7.6-3.3H23.7c-1.6,0-3.1-0.7-4.1-1.9c-1.1-1.2-1.5-2.8-1.3-4.3%20L23,12.7c0.4-3-0.4-5.8-2.3-8C18.8,2.6,16.1,1.4,13,1.4'/%3e%3cpath%20class='st0'%20d='M223,40.3c0.3,0,0.5-0.2,0.6-0.5l1.1-8.4c0-0.1,0-0.2-0.1-0.3c-0.1-0.1-0.1-0.1-0.3-0.1h-8%20c-0.3,0-0.5,0.2-0.6,0.5l-1.1,8.4c0,0.1,0,0.2,0.1,0.3c0.1,0.1,0.1,0.1,0.3,0.1H223z'/%3e%3cpath%20class='st0'%20d='M229,1.4h-35.4c-6.9,0-13.1,5.5-14,12.3L174,58c-0.4,3.3,0.5,6.4,2.6,8.7c2,2.3,4.9,3.6,8.2,3.6h35.8l0.5-5%20c0.2-2.1-0.5-4.1-1.9-5.7c-1.4-1.5-3.4-2.4-5.5-2.4l-17.2,0c-2.2,0-4.2-0.9-5.6-2.5c-1.4-1.6-2-3.7-1.8-6c0.6-4.5,4.7-8.3,9.3-8.3%20l11.5,0c0.3,0,0.6-0.2,0.6-0.5l1-8.3c0-0.1,0-0.2-0.1-0.3c-0.1-0.1-0.2-0.1-0.3-0.1l-11.6,0h0c-3.2,0-5.5-1.3-6.6-3.6%20c-1.3-2.8-1.1-6,0.6-8.6c1.8-2.8,4.8-4.5,8-4.5h18.1c4.5,0,8.3-3.3,8.8-7.8L229,1.4z'/%3e%3cpath%20class='st1'%20d='M112.3,9.9c-1.5-2.9-3.8-5.1-7-6.5c-3.1-1.4-7.4-2.1-12.8-2.1l-25.4,0h0c-2.5,0-4.8,2-5.1,4.5l-7.3,57.9%20c-0.2,1.8,0.3,3.4,1.4,4.7c1.1,1.3,2.7,1.9,4.5,1.9h23.5c4.5,0,8.4-0.4,11.6-1.2c3.2-0.8,6-1.9,8.3-3.5c2.3-1.5,4.4-3.8,6.2-6.6%20c1.8-2.8,2.9-5.9,3.3-9.1c0.5-4.1-0.2-7.6-2.2-10.6c-1.6-2.4-3.9-4.3-7-5.6l-0.9-0.4l0.9-0.5c2.5-1.4,4.6-3.2,6.1-5.3%20c2-2.7,3.2-5.5,3.6-8.5C114.4,15.9,113.8,12.8,112.3,9.9%20M101.5,21.7c-0.5,4-4,7.1-7.9,7.2H78.4l-0.2,1.3c-0.3,2.7,0.4,5.2,2.1,7.1%20c1.7,1.9,4.1,2.9,6.8,2.9h3.4c0.6,0,1.2,0.1,1.7,0.2c0.3,0,0.6,0.1,0.8,0.2l0,0.5l0.1-0.5c3.5,1.1,5.5,4.4,5.1,8.2%20c-0.6,4.6-4.8,8.4-9.5,8.4H71.4c-0.6,0-1.2-0.3-1.6-0.7c-0.4-0.5-0.6-1-0.5-1.6l4.9-38.6c0.1-1.1,1-1.8,2.1-1.8h0%20c15.3,0,18.2,0,18.8,0l0,0c1.9,0,3.7,0.8,4.9,2.1C101.2,17.9,101.7,19.7,101.5,21.7'/%3e%3c/g%3e%3c/svg%3e)
什么是波前传感器?
简单说,它是检测光波“变形”的“光学CT机”——能“透视”光束的波前畸变。理想光波的波前是规则的平面/球面,而大气湍流、光学元件误差、材料缺陷会导致波前畸变,直接影响成像质量和光束控制精度。波前传感器能够精准捕捉光线传播过程中产生的微小畸变,将人眼无法分辨的相位信息转化为清晰可见的量化数据,量化畸变并重建波前形态。
在波前传感器的发展历程中,夏克-哈特曼(Shack-Hartmann)技术凭借其实时性强、结构紧凑、易于集成等优势,已成为目前科研与工业领域应用最广泛的波前传感手段。Shack-Hartmann波前传感器使用微透镜阵列将光束分成离散的强度点阵,从而识别光穿过各个光学器件或光学组件引起的畸变。其工作原理如图1所示:
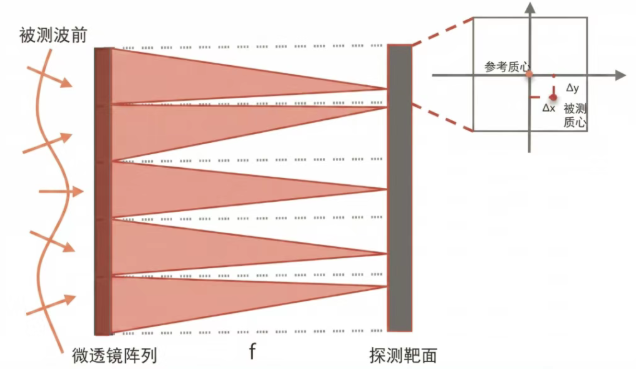
包含有测试信息的畸变波前经过波前传感器的微透镜阵列后,在探测器靶面上得到光斑阵列图象,而每个子孔径内的被测畸变波前相比参考波前的光斑质心偏移与波前斜率满足如下关系:
![]()
式中,△x和△y为畸变波前所成光斑的质心与参考波前质心在x和y方向上偏移;λ为波长;f为微透镜焦距,gx和gy为子孔径范围内波前x和y方向上的平均波前斜率。通过测△x和△y,根据上式就可以求出被微透镜阵列分割的子孔径范围内的波前平均斜率,进而采用两种方法——区域法和模式法得到波前相位分布。区域法通过有限差分模型直接求解纽曼边界条件的泊松方程,可得到被测畸变波前分布;模式法通过正交多项式一阶偏导构造的基函数拟合波前斜率,能够得到被测波前分布和各阶像差系数。
关键性能参数
衡量Shack‒Hartmann波前传感器的主要性能指标为灵敏度、动态范围、测量精度、空间分辨率及帧率。选型时需按应用场景优先级排序:精密检测优先精度与分辨率,动态监测优先帧率。核心参数需平衡,避免单一指标过度优化导致其他性能下降。

典型应用场景与光路搭建示意
-
激光光束质量测量
利用波前传感器测量激光光束质量示意图(如图2所示),被测激光束入射至波前传感器,通过波前传感器测量得到被测激光束波前相位分布、强度分布、光束发散角、M2、远场分布、环围能量曲线等参数。被测激光束的波前反映了激光传输系统的波前误差,根据波前传感器的zernike 像差系数测量结果为激光传输系统的光路调试、优化设计提供反馈。
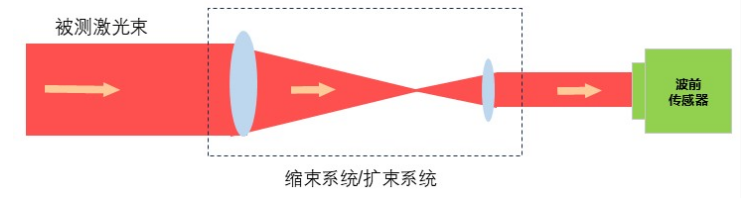
图2 激光光束质量测量示意图
-
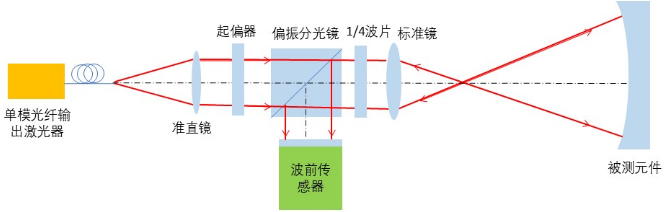
光学元件面型测量
利用波前传感器测量光学元件面形光路示意图(如图3所示),激光器单模光纤输出,经准直器输出准直光束,通过起偏器,然后经过偏振分光棱镜,透射的P光经 1/4 波片为圆偏振光,通过标准镜聚焦至被测凹面镜的球心处,然后通过凹面镜反射,再通过标准镜准直为平行光,经 1/4 波片变为S光,通过偏振分光棱镜反射至波前传感器。波前传感器相比传统干涉仪对光源的相干性没有要求,且动态范围大,不受外界环境影响,可实现动态测量。
-
流场折射率分布\等离子体密度分布测量
利用波前传感器测量流场折射率分布或等离子体密度分布光路示意图(如图4所示)。激光器单模光纤输出,经准直器准直为平行光。平行光经过被测流场/等离子体,然后再经过缩束系统,将光束缩束至合适的光斑大小,最后激光打入波前传感器中。波前传感器实时测量光束波前相位,根据流场的折射率/等离子体密度和光场相位畸变之间的理论模型,即可得到被测流场折射率分布/等离子体密度分布。
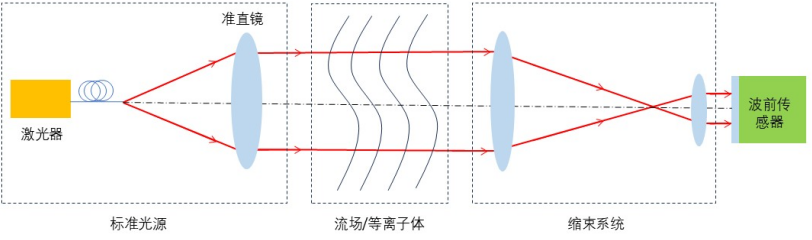
图4 流场折射率分布/等离子体密度分布测量示意图
-
光学显微相位成像/光滑表面三维形貌测量
基于波前传感器和光学显微成像系统可实现生物活体细胞等透明物体的光学显微相位成像(图5)和光滑表面三维形貌测量(图6)。照明光源可采用单模光纤输出激光器、光纤输出LED光源,携带样品信息的光源经过物镜和筒镜后入射到波前传感器上。其中,被测样品表面与波前传感器探测面需满足物像共轭,反射镜1为可选器件,加入反射镜1 ,调节载物台高低利用CMOS获取被测物体清晰像,从而辅助测量。
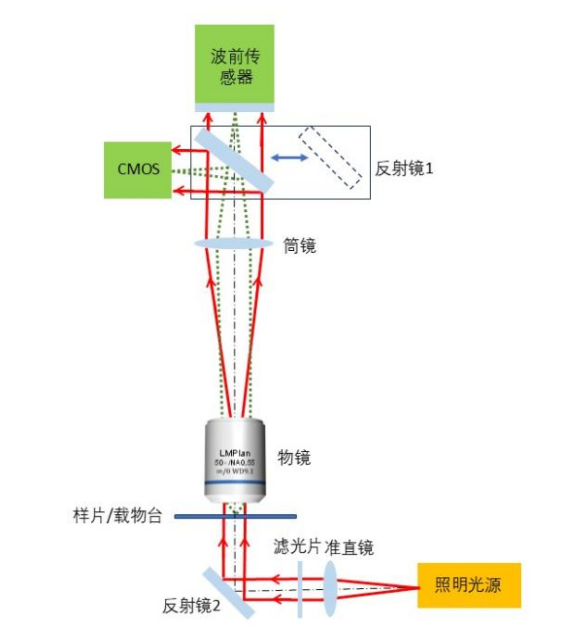
图5 透明物体光学显微相位成像示意图
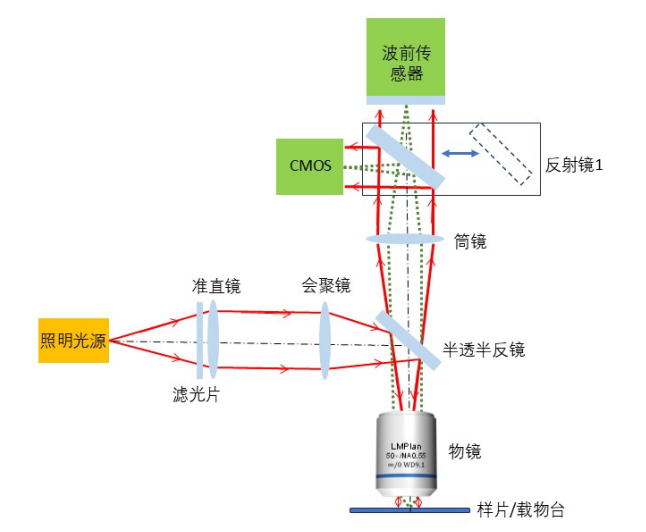
图6 光滑表面三维形貌测量示意图